
Pratik Prajapati
Post Doctoral Research
Multi-robot Systems Group
Czech Technical University in Prague
Advisor: Prof. Martin
Saska
Research Interests -
Robotics: Aerial robotics, Human-robot interaction
Control Systems: Nonlinear control, Differential geometry, Adaptive control, Model predictive
control,
Impedance control, Data-driven control
Education
-
PhD in Robotics, Indian Institute of Technology (IIT) Gandhinagar, Gujarat, India, 2019 - 2024
-
MTech in Robotics, Indian Institute of Technology (IIT) Gandhinagar, Gujarat, India, 2017 - 2019
-
BE in Mechanical Engineering, L.D.R.P. Institute of Technology and Research, Gandhinagar, India, 2012 - 2016
Patent
Publications
Journals

On-board cable attitude
measurement and controller for outdoor aerial transportation
Pratik Prajapati, Sagar Parikh, and Vineet Vashista
Robotica , Volume 40 , Issue 5 , May 2022 , pp. 1650 - 1664
Aerial Physical
Human Robot Interaction for Payload Transportation
Pratik Prajapati, and Vineet Vashista
IEEE Robotics and Automation Letters, vol. 8, no. 8, pp. 4903-4910, Aug. 2023 | Oral Presentation at
ICRA 2024 Yokohama Japan

Conferences
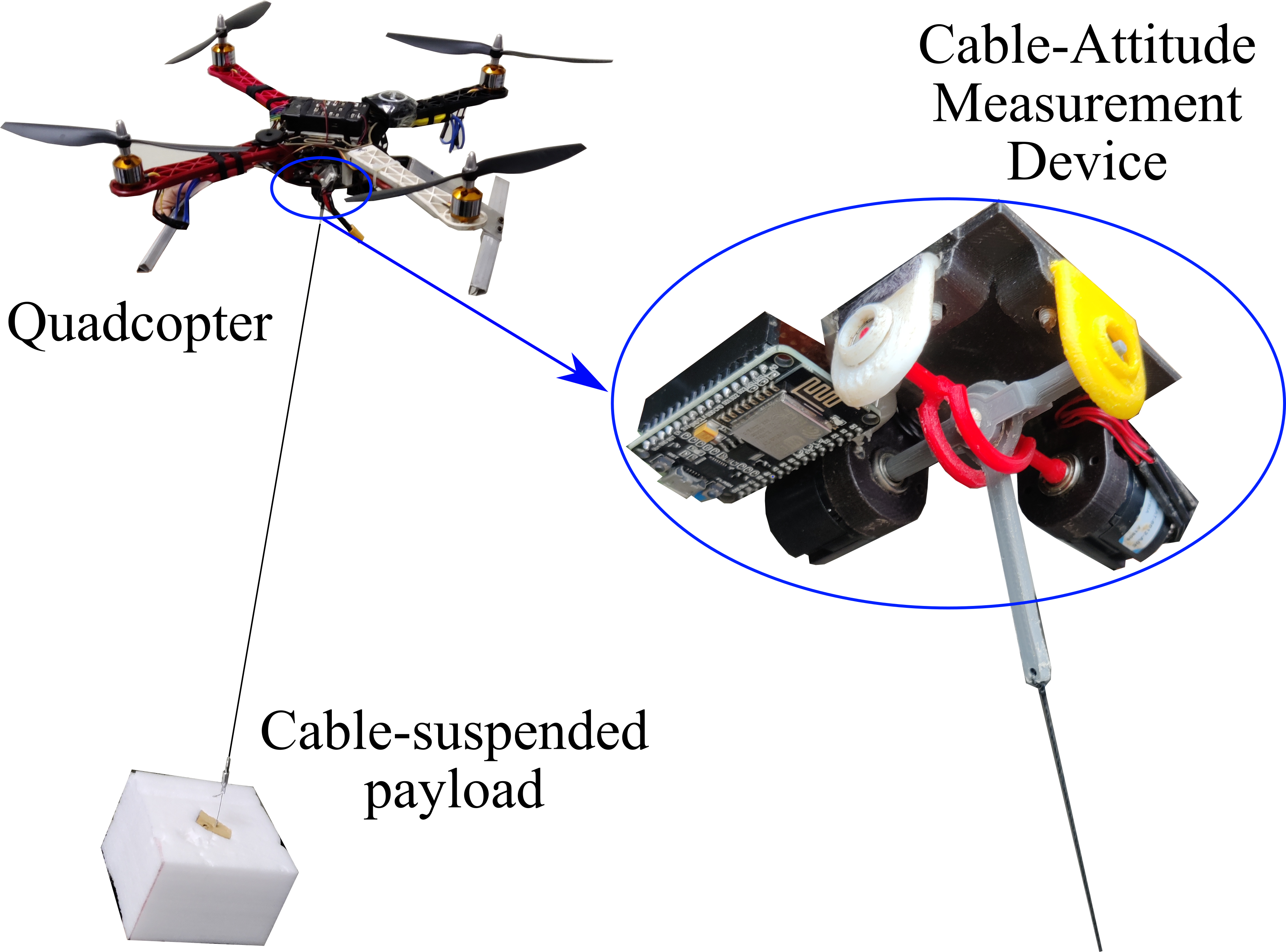
Compact and Lightweight Cable Attitude Measurement Device for Aerial Transportation Applications
Pratik Prajapati, and Vineet Vashista
TENCON 2024 - 2024 IEEE Region 10 Conference (TENCON), Singapore, Singapore, 2024, pp. 1954-1957, doi:
10.1109/TENCON61640.2024.10902676.
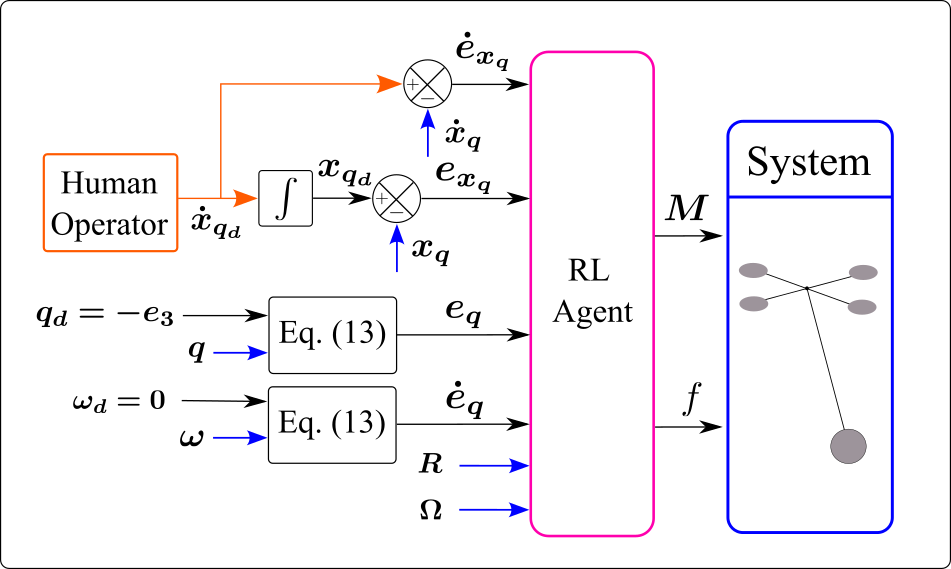
A Study on
Reinforcement Learning based Control of Quadcopter with a Cable-suspended Payload
Pratik Prajapati, Atul Patidar, and Vineet Vashista
In Proceedings of the 2023 6th International Conference on Advances in Robotics. Association for
Computing Machinery, New York, NY, USA, Article 75, 1–6,
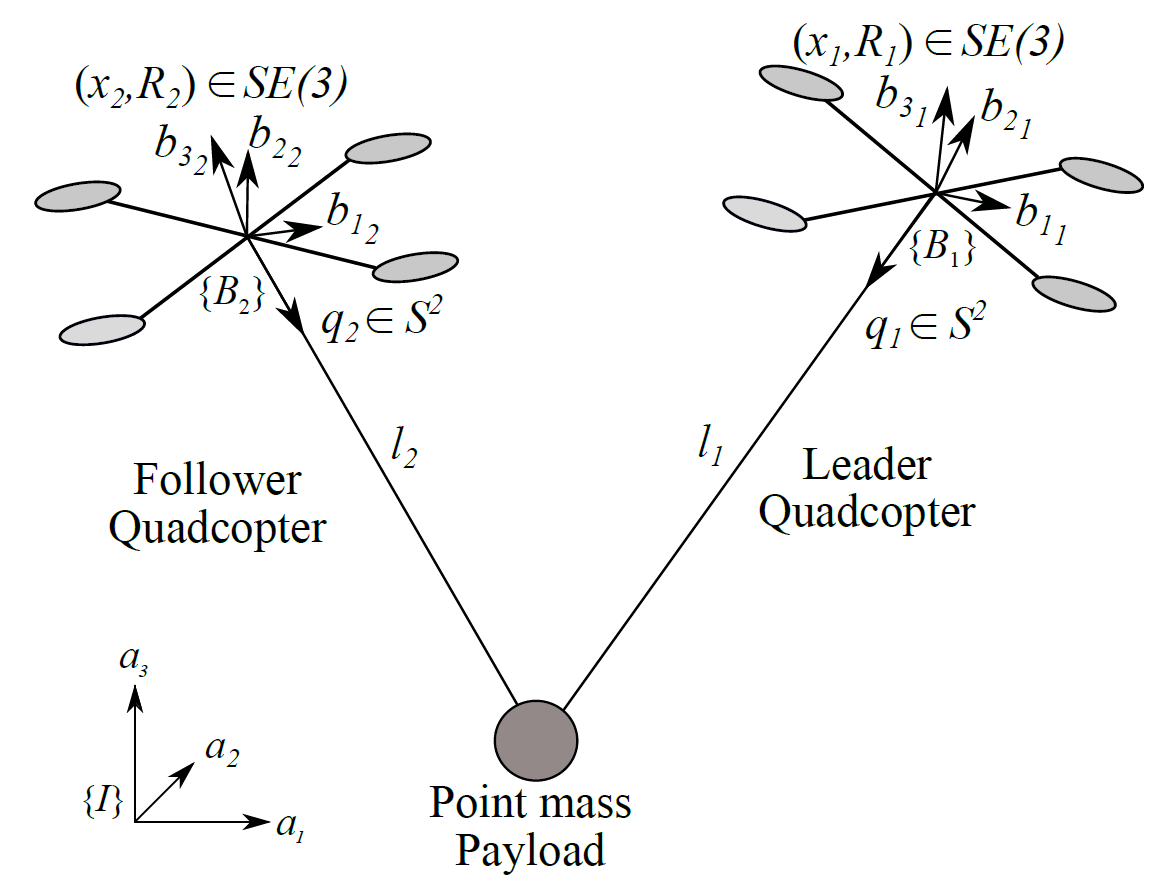
Motion Planning and Control of Two Quadcopters with Cable-Suspended Point
Mass Payload
Pratik Prajapati, and Vineet Vashista
Recent Advances in Machines and Mechanisms, Springer, Singapore. 5th International and 20th National
Conference on Machines and Mechanisms, Dec 09-11, 2021
On the Human
Control of a Multiple Quadcopters with a Cable-suspended Payload System
Pratik Prajapati, Sagar Parikh, and Vineet Vashista. 2020 IEEE International Conference on
Robotics and Automation (ICRA), 2020, pp. 2253-2258
Collaborative Transportation of Cable-Suspended Payload using Two
Quadcopters with Human in the loop
Pratik Prajapati, Sagar Parikh, and Vineet Vashista. 2019 28th IEEE International Conference on
Robot and Human Interactive Communication (RO-MAN), 2019, pp. 1-6
Funding
-
To attend International conference of Robotica and Automantion ICRA 2024, Yokohama, Tokyo, Japan, May 2024 (USD 1740)
-
Nidhi Prayas grant from Department of Science & Technology, Government of India for prototype development on anti-drone technology, Mar 2023 - Dec 2023 (USD 8500)
-
SERB International Travel Support to attend "The IEEE RAS Summer School on Multi-Robot Systems" at Czech Technical University, Prague at CTU Prague, August 2022 (USD 2000)
Practical Experience
-
Controls: Significant hands-on experience in deploying nonlinear flight control algorithms on PX4/Ardupilot firmware in C/C++
-
Programming Language: Python, C/C++, MATLAB, Simulink, SIMSCAPE
-
Tools: ROS/ROS2, Gazebo, V-REP, Git, Latex, Creo, Motion Capture System
-
Hardware Boards: Arduino, ESP8266, Portenta, Raspberry Pi
-
Operating Language: Ubuntu, Windows
Awards
-
Won best presenter awards at Doctoral Symposium at the Advances in Robotics 2023 , 6th international conference of the robotic society at IIT Ropar, July 2023
-
Promoted to Senior Research Fellow (SRF) granted by Science and Engineering Research Board (SERB), Government of INDIA, July 2021-23
-
25,000 INR (~300 USD) Cash Award for Best Conference/Journal Publications (Semester-II, 2020-21) from IIT Gandhinagar, July 2021
Contact
Faculty of Electrical Engineering
Department of Cybernetics, CTU Prague
Karlovo namesti 13, 121 35 Prague 2, Czechia
Building E, Office KN:E-123
Email: prajapra@fel.cvut.cz
